
Além da operação de robôs móveis e robôs industriais, os pesquisadores
planejam testar seu "olho artificial" em instrumentos de reabilitação e
equipamentos de diagnóstico médico. [Imagem: Georgia Tech Photo: Joshua
Schultz]
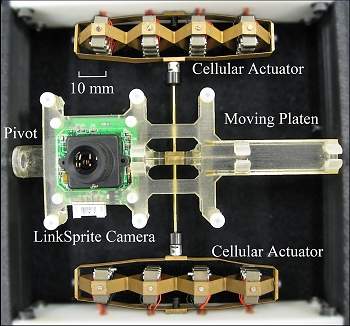
Usando materiais piezoelétricos, pesquisadores replicaram em certa medida o movimento muscular do olho humano, criando um autêntico "olho robótico".
Os músculos artificiais controlam uma câmera com um nível de precisão que promete mudar o campo da visão artificial.
Isso permitirá não apenas otimizar a operação dos robôs, como também aprimorar aplicações como câmeras de vigilância e a chamada visão de máquina, usada para inspecionar processos industriais em alta velocidade.
Joshua Schultz e Jun Ueda desenvolveram um atuador piezoelétrico celular usando uma nova tecnologia inspirada na biologia - conectando cristais piezoelétricos como se eles fossem células musculares.
"Para que um robô seja verdadeiramente bioinspirado, ele precisa de atuadores, ou geradores de movimento, com propriedades similares às da musculatura dos organismos biológicos," disse Schultz. "Nossos atuadores têm muitas propriedades em comum com os músculos biológicos, especialmente a estrutura celular."
Estrutura celular
Materiais piezoelétricos - um tipo de cerâmica - expandem ou contraem quando recebem uma carga elétrica, oferecendo uma forma de conversão direta de sinais em movimento.
Mas essa expansão é pequena, o que tem reduzido o uso de atuadores piezoelétricos no campo da robótica.
Usando o que eles chamam de "estrutura celular", os pesquisadores conectaram inúmeros pequenos atuadores em série e em paralelo, obtendo um curso de deslocamento do músculo artificial muito maior.
O sistema fica mais compacto e consome menos energia do que mecanismos miniaturizados comparáveis, como os usados em câmeras fotográficas para fazer o foco automático.
"Cada atuador, similar a uma fibra muscular, tem um material piezoelétrico e um conjunto hierárquico de mecanismos aninhados de amplificação," explica Ueda.
Cinemática
Um dos objetivos dos cientistas era tentar resolver um enigma antigo.
Um olho artificial controlado por cabos consegue produzir a cinemática do olho biológico, mas servomotores rígidos não permitem testar hipóteses sobre a base neurológica para o movimento dos olhos.
"Ao contrário dos atuadores tradicionais, os atuadores celulares piezoelétricos são controlados pelo mesmo princípio de operação dos músculos, ou seja, o movimento é resultado da ativação discreta de conjuntos de fibras ativas, chamadas unidades motoras," continua Ueda.
Isso permite que o conjunto reaja de acordo com as necessidades, o que é crítico para os robôs, que devem operar em ambientes não estruturados e, muitas vezes, desconhecidos.
Além da operação de robôs móveis e robôs industriais, os pesquisadores planejam testar seu "olho artificial" em instrumentos de reabilitação e equipamentos de diagnóstico médico.
Nenhum comentário:
Postar um comentário